Soft Gripper Solution for Small Square Injection-Molded Parts Pick & Depaneling Application
This case study focuses on a soft gripper-based pick-and-place and depaneling application for square injection-molded parts, highlighting the technical challenges, failure analysis, and the optimized wear-resistant solution.
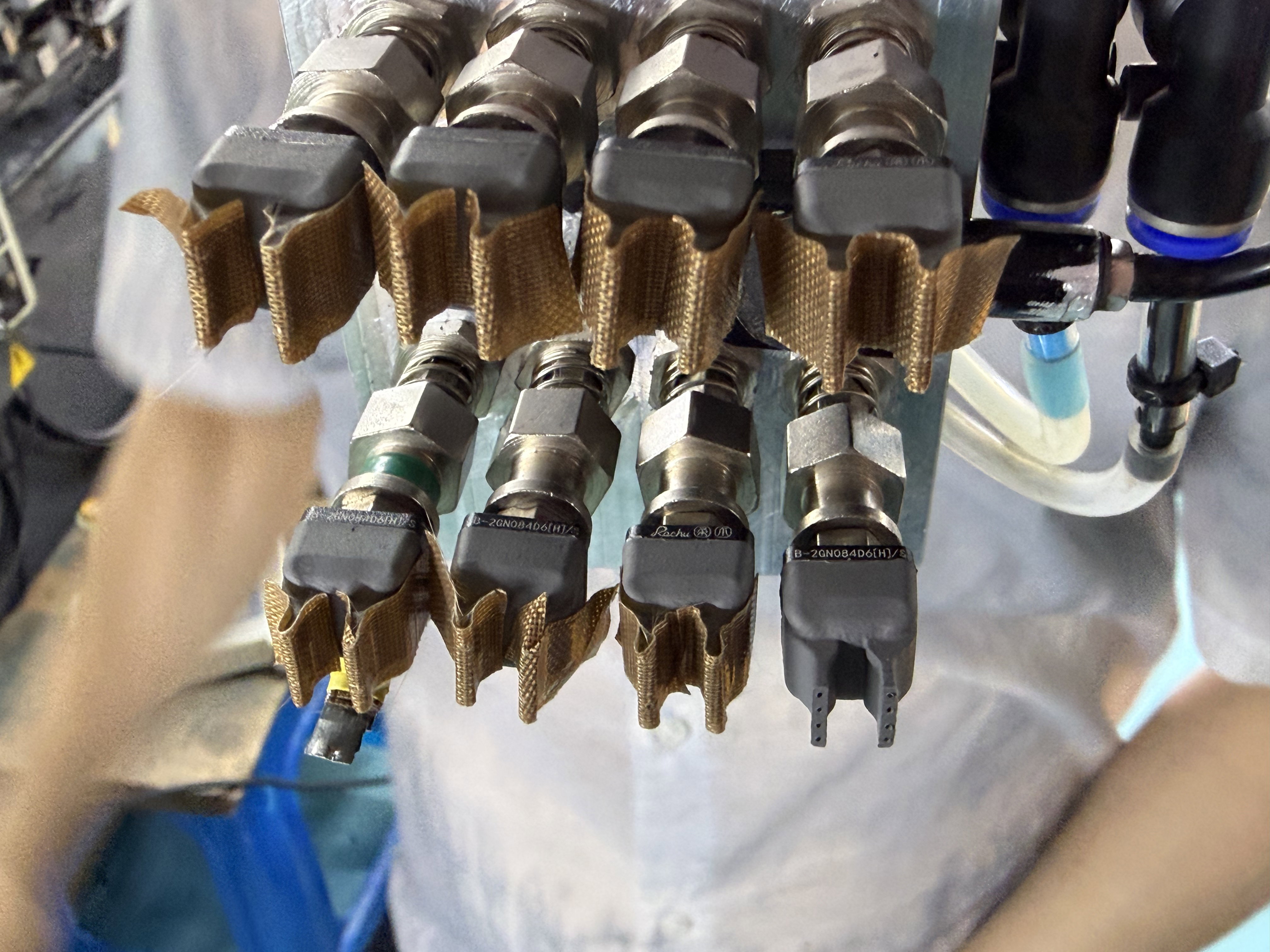
Application Overview: Small Part Pick & Depaneling
The application involves handling square injection-molded parts with the following key parameters:
- Part shape: Square injection-molded components
- Gripping position size: 4.09 mm
- Center distance: 15 mm
- Gripping quantity per cycle: 8 pieces per pick
The soft gripper is required to simultaneously pick multiple tightly spaced micro parts with high repeatability and stability.
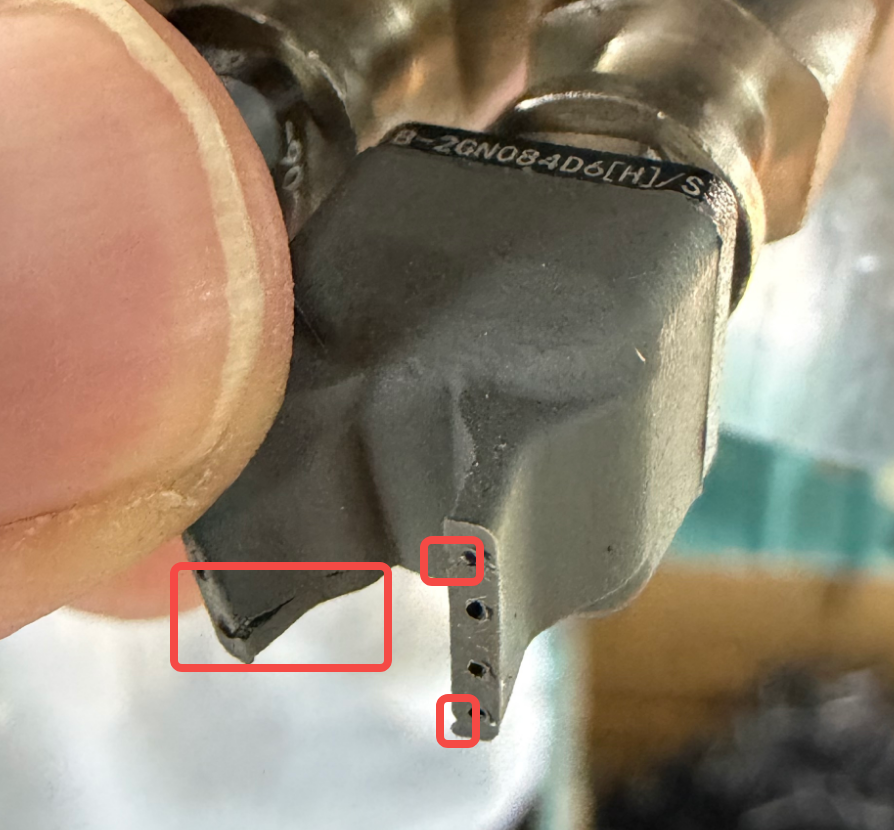
Key Challenge: Premature Wear After Short Operation Cycle
During initial production testing, a critical issue was observed:
- Under normal conditions, the system began showing visible wear and damage after only 3 days of operation
- This corresponds to approximately 20,000 cycles
- Total field operation reached 20 days, with fewer than 100,000 open-close cycles
- Despite relatively low cycle count, gripper surface damage became increasingly severe
This significantly affected long-term stability and maintenance cost.
Root Cause Analysis: Force-Assisted Part Extraction
After on-site evaluation and process review, the root cause was identified:The injection-molded parts were not fully ejected during the demolding process.As a result:
- The parts remained partially stuck in the mold or fixture
- The soft gripper had to close and clamp onto the part first
- Additional external force was required to pull the part out during gripping
- This created continuous friction + shear stress on the gripper contact surface
Over time, this abnormal load condition led to accelerated wear and surface failure.
Engineering Problem Summary
This is not a typical wear issue caused by cycle fatigue alone.Instead, the failure mechanism was driven by:
- High friction during forced extraction
- Repeated micro-sliding under load
- Insufficient surface protection under dynamic pulling force
- Localized abrasion at contact points
In short, the gripper was performing both gripping and demolding extraction simultaneously, which exceeded its original working assumption.
Optimized Solution: Wear-Resistant Contact Material Upgrade
To address both durability and gripping stability, a new surface solution was developed.
Proposed improvement:
- Adoption of a wear-resistant laminated contact material
- Designed to replace traditional PTFE tape (Teflon tape)
- Engineered to provide:
- Higher abrasion resistance
- Stable friction coefficient (non-slip performance)
- Improved surface durability under repeated extraction forces

Why Replace PTFE Tape?
While PTFE (Teflon) tape offers low friction, it is not ideal for this application due to:
- Limited wear resistance under repeated mechanical pulling
- Surface degradation under shear stress
- Reduced consistency after extended cycling
The new material solution balances:
- Controlled friction (to prevent slipping during extraction)
- Enhanced durability (to withstand long-cycle industrial use)..
Expected Result After Optimization
With the upgraded wear-resistant material:
- Extended gripper service life under force-assisted extraction conditions
- Reduced surface degradation and maintenance frequency
- More stable multi-point gripping for 8-part simultaneous handling
- Improved process reliability in continuous production environments
Conclusion
This case highlights an important principle in soft gripper applications:
When parts are not fully released from the mold, the gripper is no longer just handling—it becomes part of the extraction mechanism.
By upgrading the contact interface material, we effectively addressed both wear resistance and anti-slip performance, ensuring stable operation in demanding depaneling environments.