Hochpräzisionssystem für Softrobotik

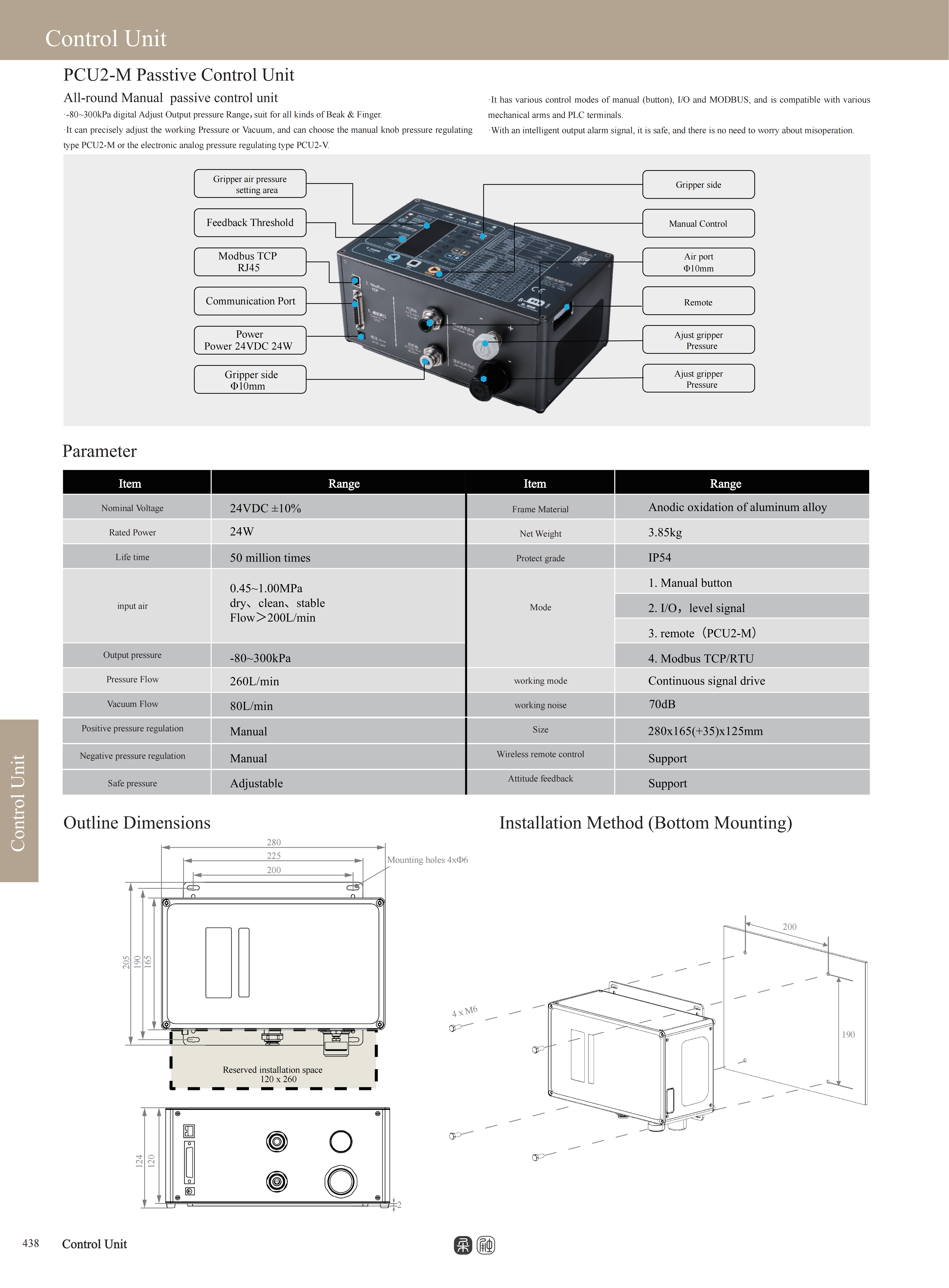
Soft Robotics Gripper Controllers provide a high-precision control platform engineered for soft robotic end effectors, delivering accurate pressure, position, and force regulation for consistent grasping across dynamic environments. Designed for demanding industrial and research use, the system supports stable closed-loop control, rapid response, and repeatable performance, helping reduce cycle time and product damage. Flexible configuration and integration-friendly interfaces simplify deployment with common automation architectures, while robust monitoring and diagnostics enhance reliability, process visibility, and maintenance planning.
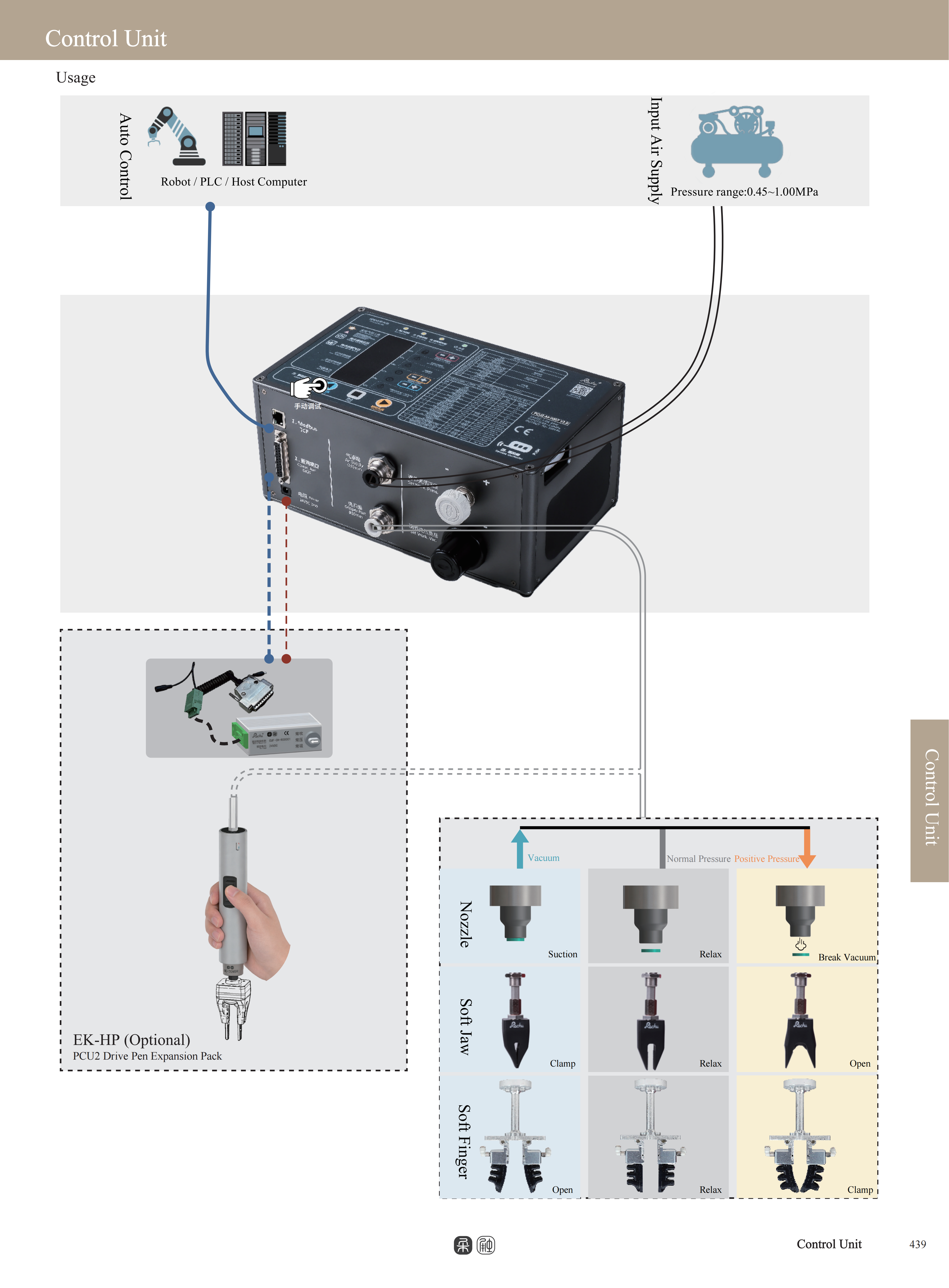
how to use it: