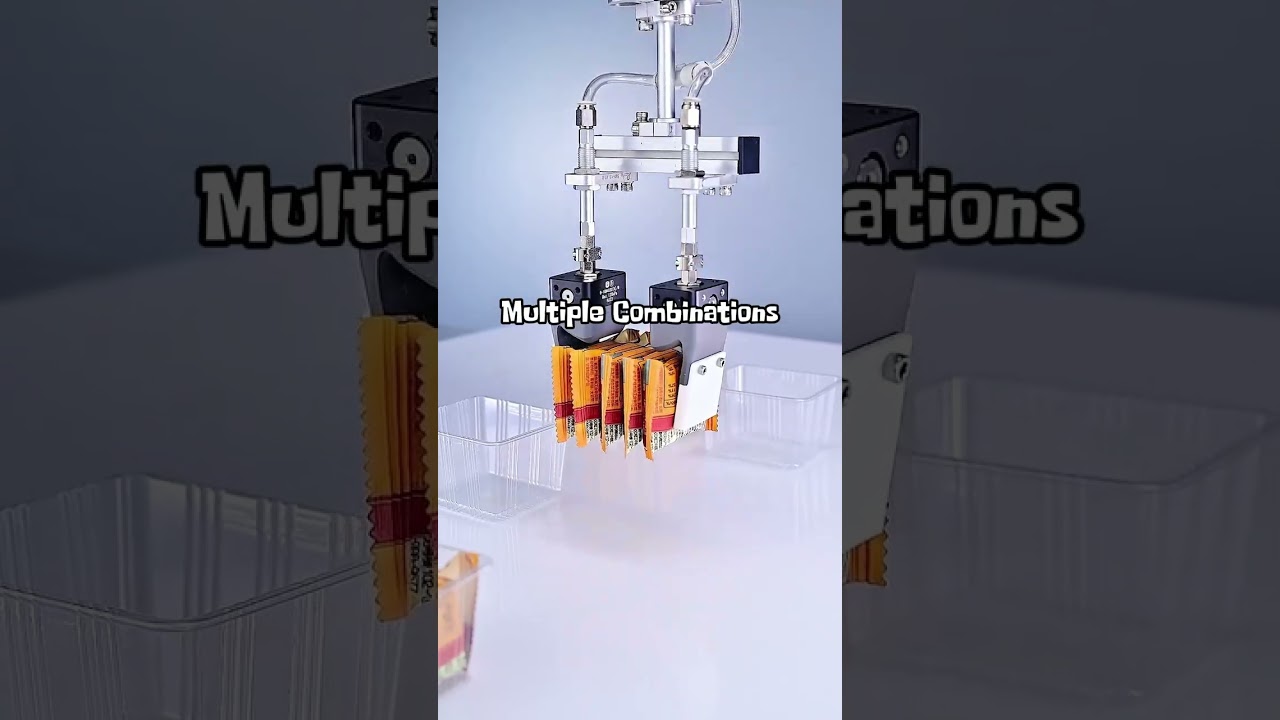
Soft Gripper Solution for Automated Bagged Biscuit Handling and Cartoning
n food packaging lines, biscuits may appear easy to handle, but they present several challenges for robotic automation, especially during the final cartoning stage.Many manufacturers need to pick multiple bags of biscuits simultaneously and place them vertically into cartons to achieve the required packaging speed. Traditional vacuum cups and rigid grippers often struggle to meet the demands of this application.
Application Challenges
1. Vertical Multi-Pack Cartoning Limits the Use of Vacuum Cups
To maximize throughput, multiple packaged biscuits must be picked and loaded into cartons simultaneously while maintaining a vertical orientation.Because of the packaging shape and arrangement, there is often insufficient surface area for vacuum suction. In addition, the required gripping posture makes vacuum cups difficult to deploy effectively.
2. Biscuits Are Fragile and Sensitive to Excessive Force
Although the biscuits are already packaged, excessive gripping force can still crush or damage the products inside the bags.Traditional pneumatic grippers typically provide limited force control and may apply concentrated pressure to the product. Furthermore, their heavier structure increases the overall payload requirement of the robot, especially when multiple grippers are used in parallel.
3. Limited Space Between Products
The spacing between falling or indexed biscuit packages is often very small.This leaves limited room for end-of-arm tooling, requiring a compact gripping solution that can reliably enter narrow gaps without disturbing adjacent products.
Soft Gripper Solution
To address these challenges, a soft gripper solution with custom conformal gripping blocks was developed.
Soft Fingers with Adjustable Gripping Force
The soft gripper is made from compliant materials that naturally adapt to product contours.Gripping force can be precisely adjusted through air pressure control, allowing the robot to securely hold the biscuit packages without crushing or deforming them.
Conformal Structure for Improved Stability
A custom-shaped conformal gripping block is integrated into the internal-skeleton soft gripper design.The contour of the gripping block matches the shape of the packaged biscuits, creating a larger contact area and improving positional stability during high-speed transfer.To further enhance performance, foam padding is attached to the gripping surface.
This provides:
- Increased friction
- Better surface compliance
- Reduced local pressure points
- More stable gripping of loosely arranged products
As a result, multiple biscuit packs can be picked simultaneously with excellent repeatability.
Lightweight and Compact Design
Compared with traditional pneumatic grippers, the soft gripper features a much lighter structure.Benefits include:
- Lower robot payload requirements
- Higher system acceleration
- Reduced energy consumption
- Easier multi-gripper integration
- Compact dimensions for narrow product spacing
Benefits of Using Soft Grippers for Biscuit Packaging
By combining soft gripping technology, internal-skeleton fingers, custom conformal blocks, and foam friction surfaces, the solution provides:
- Gentle handling without crushing biscuits
- Stable gripping of multiple packages simultaneously
- Reliable operation in limited spaces
- Reduced robot payload requirements
- Improved packaging line efficiency
- Faster integration into automated cartoning systems
For biscuit packaging applications that require high-speed, multi-product cartoning, traditional vacuum and rigid gripping solutions often face limitations in accessibility, stability, and product protection.A soft gripper equipped with conformal gripping blocks and foam-enhanced contact surfaces offers a practical alternative. The combination of adaptive gripping, controllable force, and lightweight construction enables reliable handling of fragile biscuit packages while maintaining the speed and efficiency demanded by modern food packaging lines.