Controladores

Controlador de pinza blanda LCU-H Rochu. Microcontrolador modular para automatización.
El controlador LCU-H Rochu Soft Gripper es un microcontrolador modular diseñado para la automatización, que proporciona un control preciso y fiable de las pinzas robóticas blandas. Ideal para la página de controladores de pinzas robóticas blandas, permite una integración flexible y un diseño de sistema escalable para tareas de manipulación industrial.
Saber más
Sistema de control de alta precisión para robótica blanda
Los controladores para pinzas de robótica blanda ofrecen un control de alta precisión para sistemas robóticos blandos, lo que permite una regulación precisa de la presión, la posición y la fuerza para un rendimiento de agarre fiable en aplicaciones exigentes.
Saber más
Traje de unidad de control de pinza de robot suave ACU2-B para demostración
El kit de control ACU2-B para pinzas de robótica blanda proporciona un paquete de controlador profesional listo para demostraciones, que permite operar pinzas de robótica blanda. Diseñado para configuraciones centradas en el controlador, ofrece una actuación fiable, una configuración rápida y un rendimiento constante para demostraciones dentro del ecosistema de pinzas de robótica blanda.
Saber más
Traje de unidad de control de pinza de robot suave ACU2-H para demostración
La unidad de control ACU2-H para pinzas de robots blandos está diseñada para demostraciones en el sitio web de Soft Robotics Gripper. Proporciona un control fiable y fácil de usar para mostrar el rendimiento de la pinza en la página de controladores.
Saber más
iPCU 2-SMN / iPCU-HMN Unidad de control pasiva integrada
Modo de control estándar La “unidad de control pasivo integrado” iPCU tiene el mismo principio con la PCU, tiene un tamaño más pequeño que la PCU, un peso 50% menos que la PCU, el mismo modelo iPCU tiene un 20% más de eficiencia. La interfaz de tipo abierto iPCU es más adecuada para integrarse como un módulo separado en el gabinete de control y el cuerpo del robot
Saber más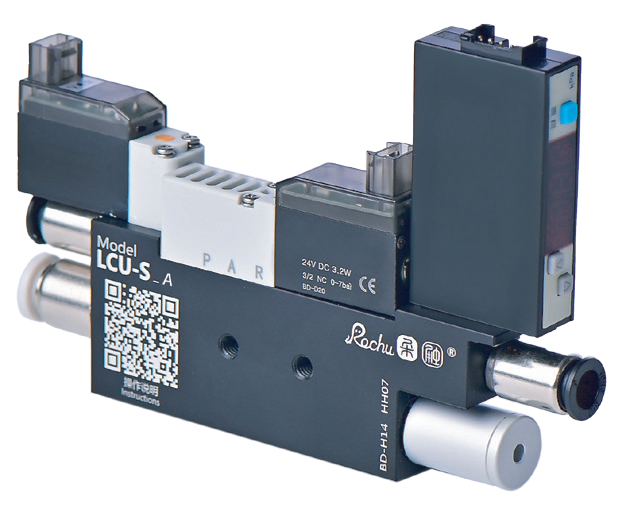
Controlador Rochu LCU-S para aplicaciones ligeras: módulo de accionamiento estándar para robótica blanda.
El módulo de control LCU-S para aplicaciones ligeras (tipo estándar) es una solución de control compacta y eficiente diseñada para las pinzas blandas Rochu en aplicaciones de automatización ligera.
Saber más
(Suspender producción) Unidad pasiva PCU-SMN/PCU-HMN
La unidad de control pasivo PCU en modo de control estándar es impulsada por aire comprimido, está especialmente diseñada para trabajar en la escena con compresor de aire, coordinada con el brazo robótico de la industria, estable y duradera, larga vida útil, velocidad rápida, marco de metal, alto nivel de protección, puede funcionar En mal estado de funcionamiento, con certificado CE.
Saber más
(Suspender la producción) Unidad de control pasivo integrado iPCU-CMN - Modelo compacto
Modo de control estándar iPCU-CMN es la unidad de control más económica. Es accionado por aire comprimido y controlado por 24VDC., fácil de poner en el gabinete de control o en la solución robot shoulder.low cost.
Saber más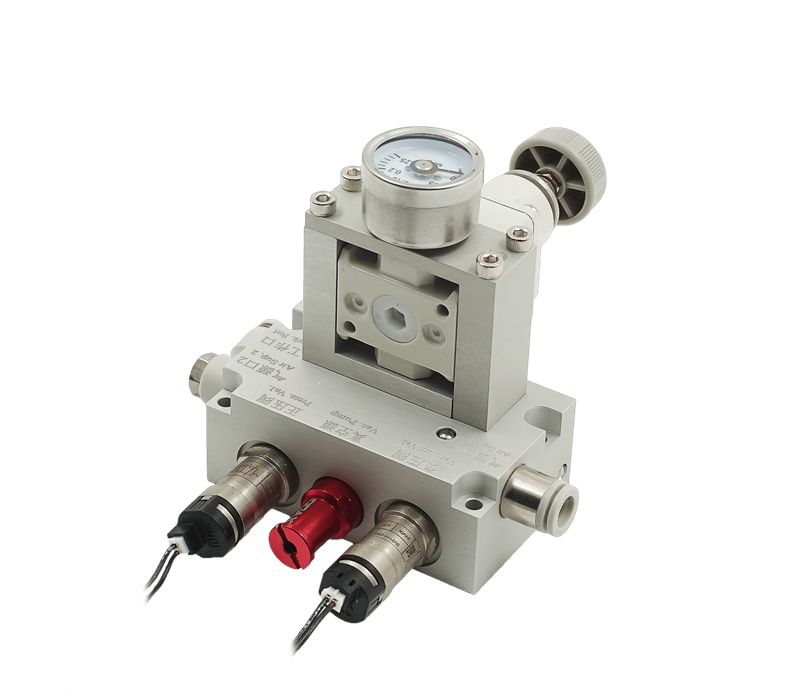
(Suspender la producción) Unidad de control pasivo integrado iPCU-LMN - Modelo ligero
Modo de control estándar iPCU-LMN es la unidad de control más pequeña y ligera. Es accionado por aire comprimido y controlado por 24VDC., fácil de poner en el gabinete de control o en el hombro del robot.
Saber más
(Suspender producción) Unidad de control activo ACU-MMN - Regulador de presión de aire manual Modelo estándar
Modo móvil El disco activo ACU tiene un controlador incorporado y una batería. Puede conducir continuamente la pinza Rochu durante 3,5 horas sin alimentación ni suministro de aire. Está diseñado para el sitio de trabajo de fuente sin aire y se puede utilizar para estaciones de trabajo de robots móviles AGV o garras de tacto suave. El sitio de trabajo preparado para la puesta en servicio es liviano, fácil de transportar, simple de operar, enchufar y usar, lo que reduce las engorrosas tuberías en el sitio de puesta en servicio, ahorra tiempo de preparación para la comisión y pasa la certificación de seguridad CE.
Saber más