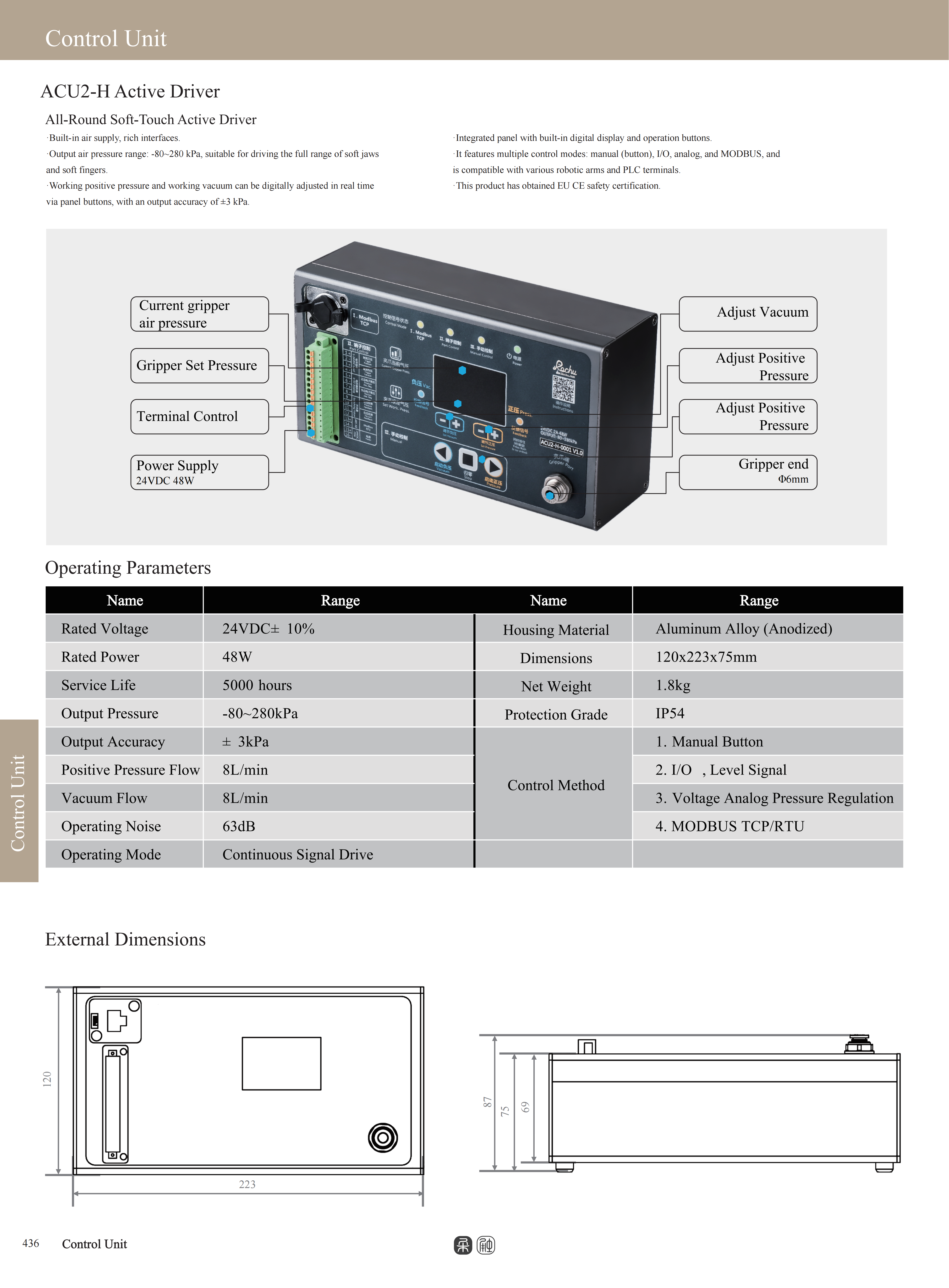
ACU2-H Soft robot gripper control unit suit for demostration

The ACU2-H Soft Robot Gripper Control Unit Suit is a complete, demo-ready control package for presenting soft gripper capabilities on the Soft Robotics Gripper website’s Controllers page. Built for quick setup in trade shows, labs, and customer briefings, it delivers stable pneumatic regulation, intuitive operation, and clear status indicators to support repeatable grasp cycles. The unit helps highlight gentle handling, adaptability to varied shapes, and consistent performance, while simplifying demonstrations with straightforward connections, preset modes, and dependable control for professional showcase environments.
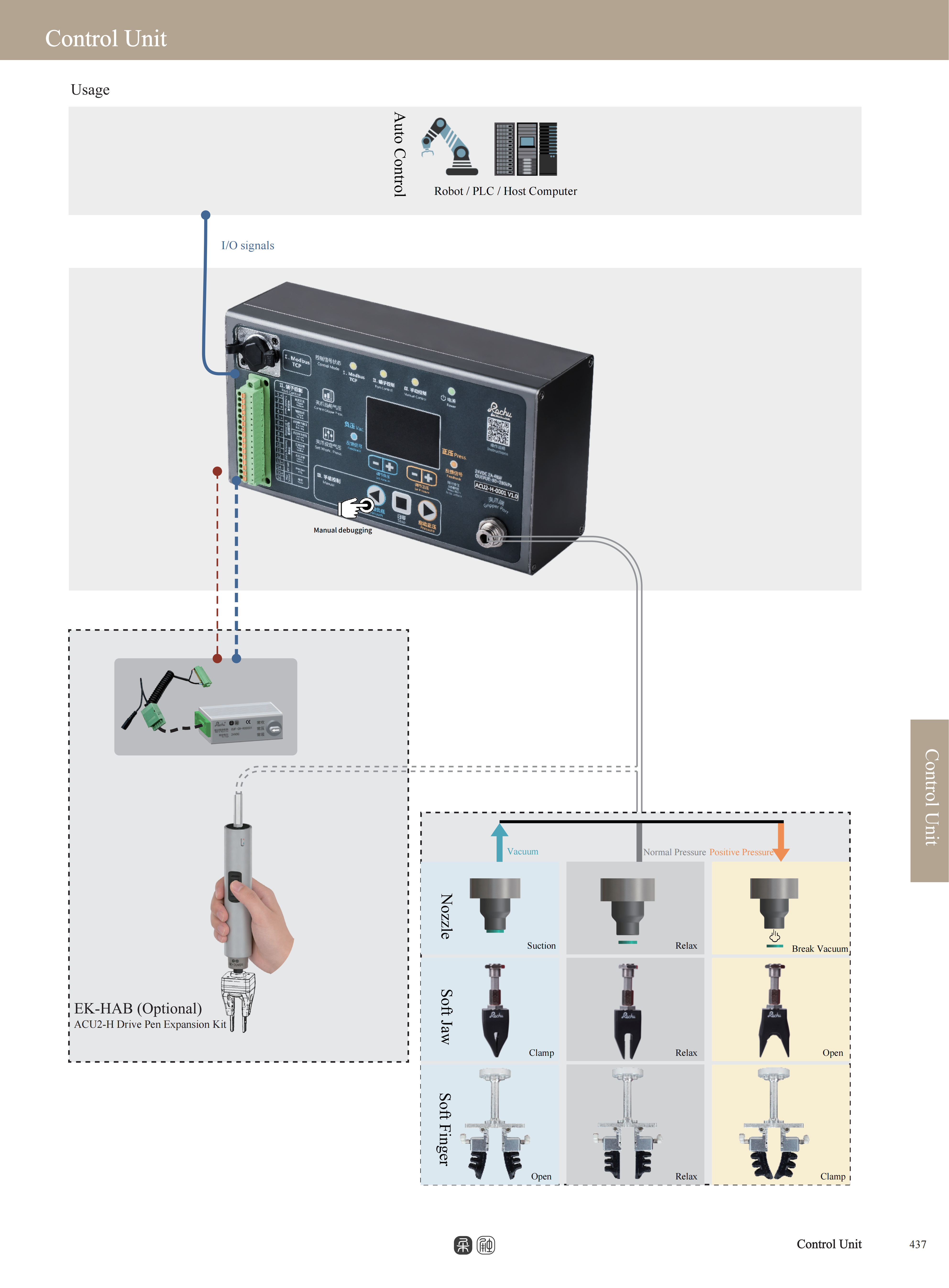
how to use it :