Костюм пальца
Рочу Модульный роботизированный палец для автоматизации
Роботизированный захватный костюм Finger Suit от Soft Robotics Gripper включает в себя модульный роботизированный палец Rochu для автоматизации, разработанный для обеспечения адаптивного и точного манипулирования в широком спектре производственных задач. Его модульная архитектура поддерживает быструю смену конфигурации, обеспечивая эффективную интеграцию в существующие системы автоматизации. Идеально подходит для применений, требующих контролируемого перемещения и повторяемости результатов.
Подробнее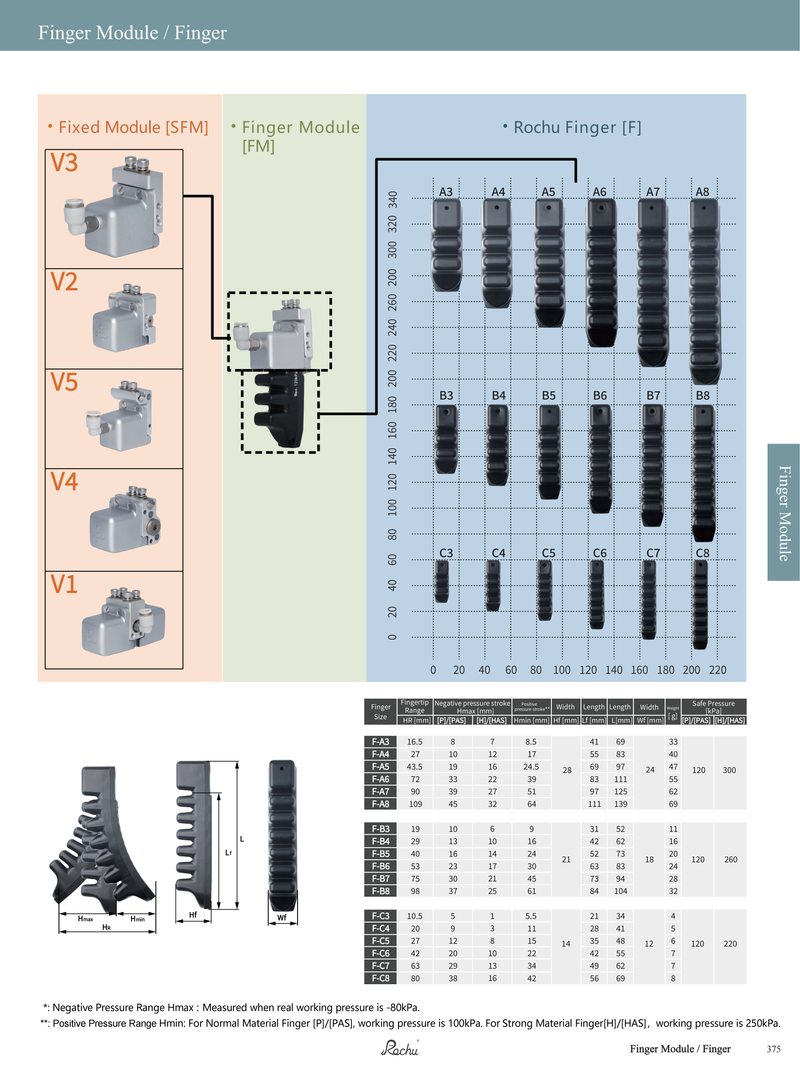
Захватывающий палец Rochu для мягкой робототехники
Rochu Finger (см. страницу Finger Suit на Soft Robotics Gripper) — это гибкий, мягко управляемый модуль в форме пальца, разработанный для обеспечения контролируемого, адаптивного захвата. Его гибкая структура принимает различные формы, сохраняя при этом стабильный контакт, что обеспечивает более безопасное взаимодействие с хрупкими предметами и в приложениях, связанных с контактом с рукой человека.
Подробнее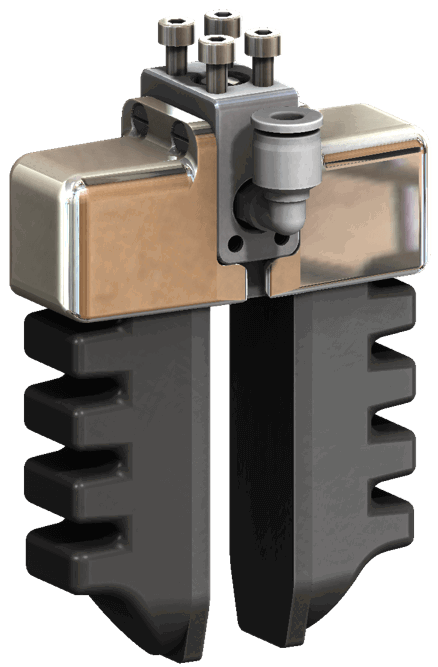
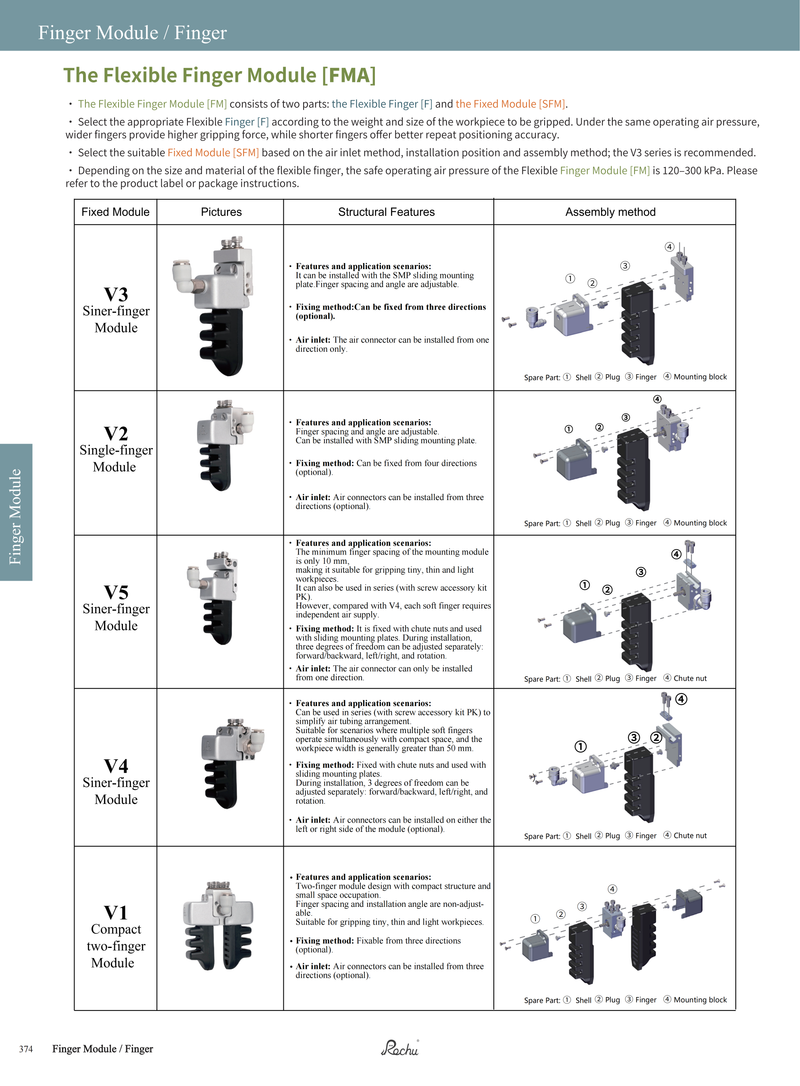
Модуль захвата и перемещения Rochu Finger Module FMA-V1: высокоточный манипулятор.
Высокоточный манипулятор Rochu Finger Module FMA-V1 обеспечивает надежные и воспроизводимые манипуляции в робототехнике и системах автоматизации. На странице Finger Suit компании Soft Robotics Gripper он представлен как высокоточный модуль, разработанный для выполнения задач точного захвата, перемещения и выравнивания в производственных условиях.
Подробнее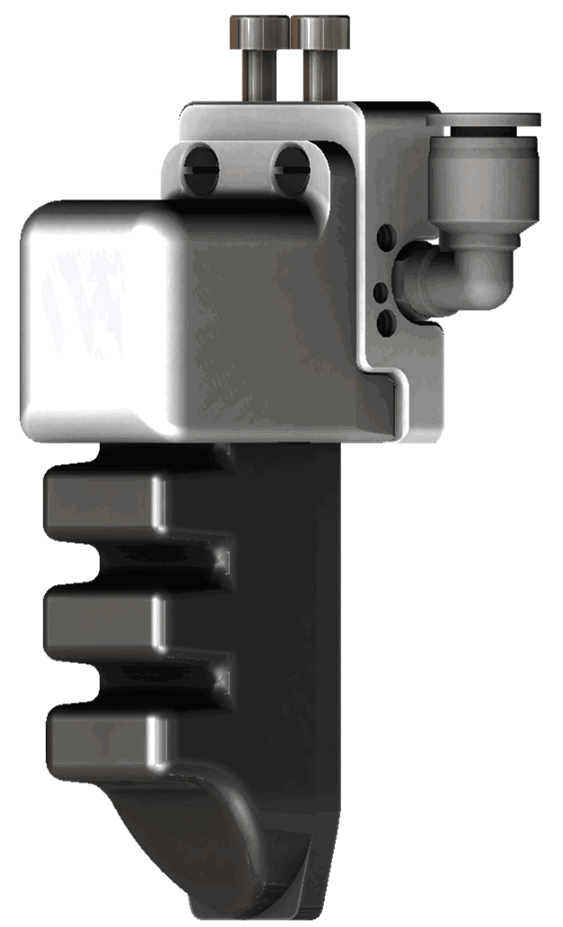
Модуль пальца Rochu FMA-V2 — мягкий роботизированный палец с низким уровнем ударной нагрузки.
В состав Finger Suit входит модуль Rochu Finger Module FMA-V2 — мягкий роботизированный палец с низким уровнем ударной нагрузки, разработанный для бережного и адаптивного захвата. Созданный для платформы Soft Robotics Gripper, он адаптируется к различным формам и деликатным поверхностям, помогая снизить силу контакта и предотвратить повреждение продукции в автоматизированных рабочих процессах.
Подробнее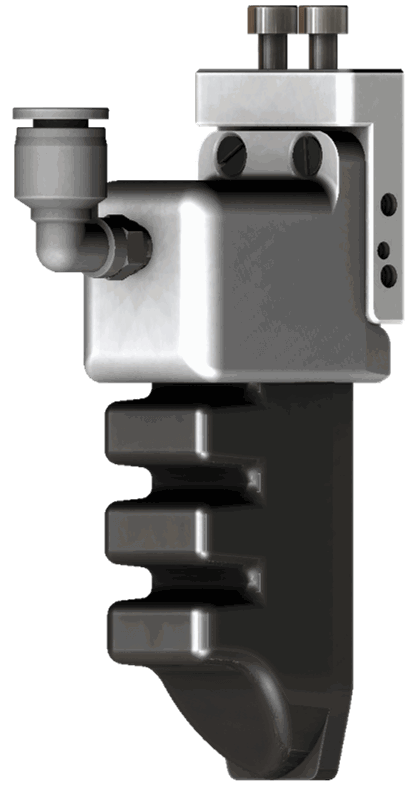
Адаптивный захватный палец Rochu Finger Module FMA-V3 для захвата предметов неправильной формы.
Модуль Rochu Finger Module FMA-V3 — это адаптивный захватный палец, разработанный для адаптации к неровным формам с обеспечением стабильного и контролируемого контакта. Представленный на странице Finger Suit в Soft Robotics Gripper, он обеспечивает надежное управление там, где традиционные жесткие пальцы испытывают трудности, повышая стабильность захвата при изменении геометрии.
Подробнее
Rochu Finger Module FMA-V4 Soft Robotic Finger Module for Precision Electronics & Automation
Модуль Rochu Finger Module FMA-V4 — это мягкий роботизированный модуль для захвата пальцев, разработанный для точной работы с электроникой и высокоточной автоматизации. Представленный на странице Finger Suit на сайте Soft Robotics Gripper, он обеспечивает гибкий и контролируемый захват, снижая повреждение деталей и сохраняя стабильное положение при деликатной сборке и операциях по перемещению объектов.
Подробнее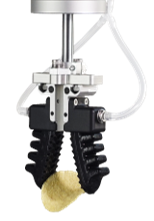
Модульный захват для пальцев Rochu Finger Module FMA-V5 предназначен для применения в автомобильной, логистической и промышленной отраслях.
Модуль Rochu Finger Module — это гибкий, мягкий роботизированный палец, разработанный для точной работы с деталями в различных отраслях промышленности. Он адаптируется к деликатным, неровным или хрупким деталям, включая электронику, автомобильные компоненты, медицинские изделия и пластмассовые изделия. Легкий и модульный, он легко интегрируется в роботизированные системы автоматизации, повышая эффективность и предотвращая повреждение деталей.
Подробнее