Finger material characteristics of soft robotic grippers
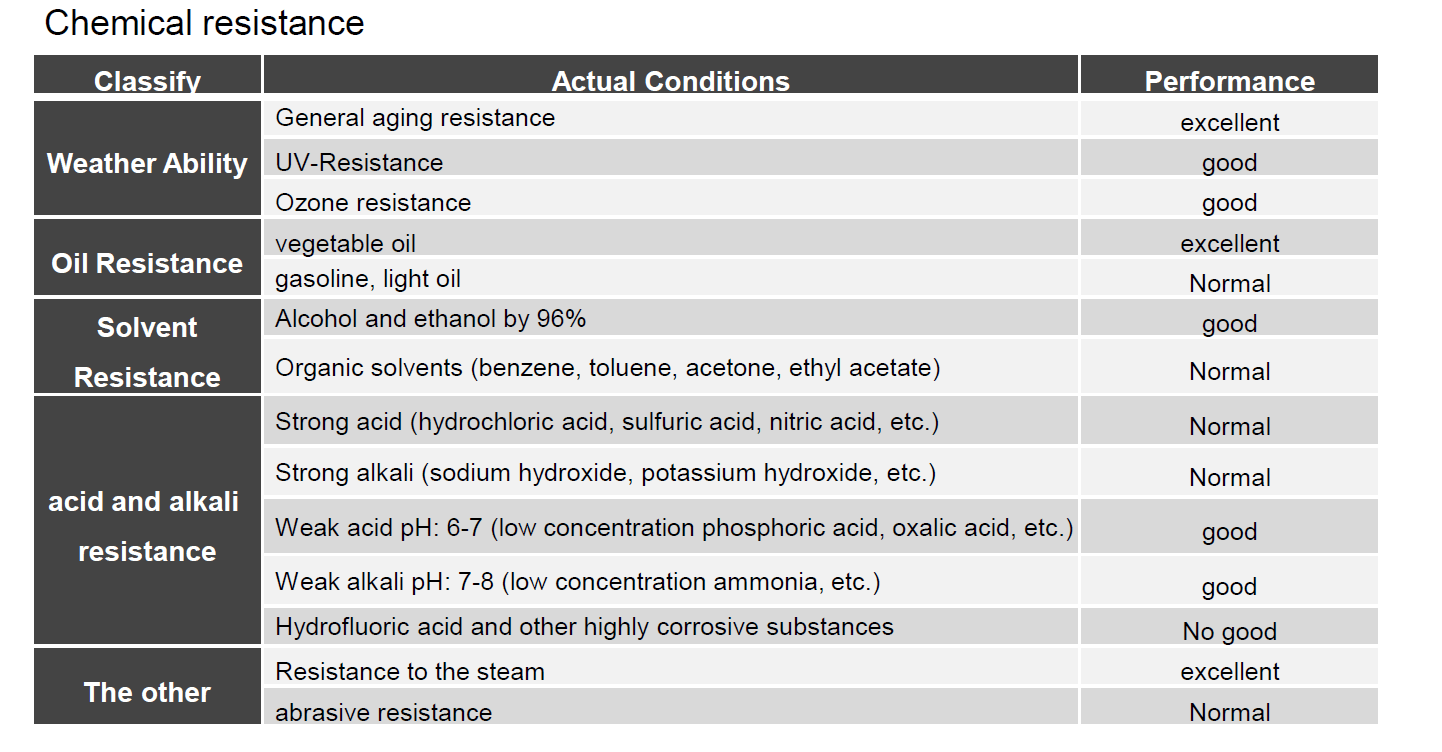
Material safety performance

Heatresistance
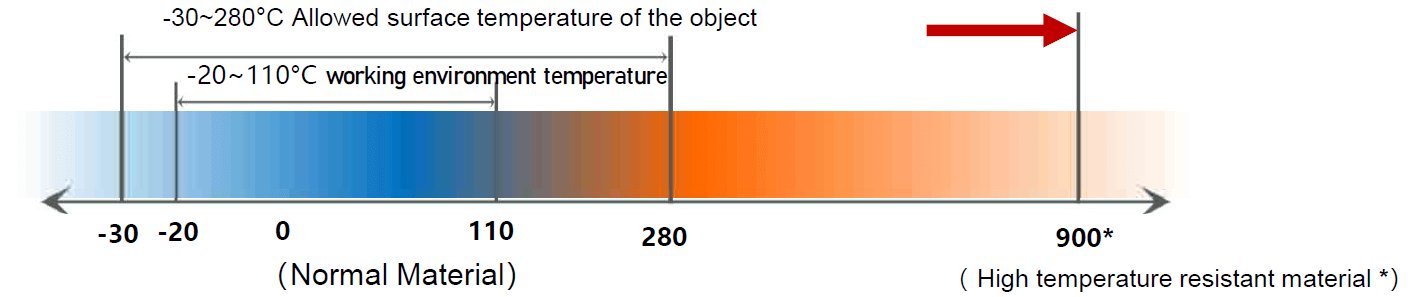
* High temperature resistant material need to be customized, please contact us.
Material safety performance
Heatresistance
* High temperature resistant material need to be customized, please contact us.