What is Working principle of robotic soft grippers?
Rochu soft robotic grippers is a pneumatic driving gripper. By positive pressure or vacuum air flow, the soft gripper open or grab.
By adjusting the air pressure to control the grabbing force(soft finger) or opening space(soft beak).
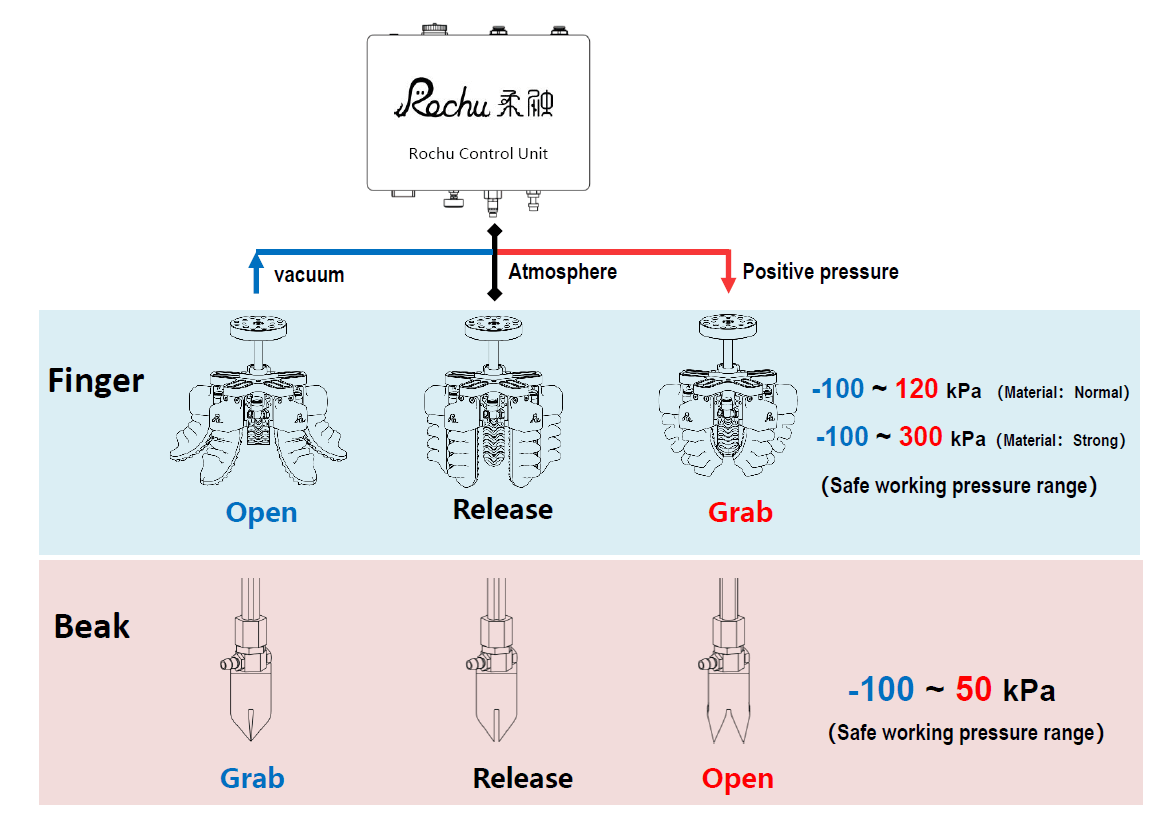
The working pressure must be kept within a safe range, overload may cause irreversible damage of the finger. It is recommended to use our "Rochu control unit" to ensure the life time of the soft finger and beak.